
| POST & AUTOR & Vision | STS - Solar Thruster Segler | RSS - Ring Segment System | LTH - Launcher Transport Kopf | EFO - Experimentelles Flug Object | RSC - Rotations Schleuder |
|
Starre. einfach zu montierende Kern- Docking- und Nutzlaststation mit integriertem Solarzellen-Kraftwerk. Diese Einheit besteht aus 3 Inneren miteinander verbundenen Ringen, die zwei äußeren nehmen Solarzellen und andere Ausrüstung auf, während der innerste zur Aufnahme von Tochter-Raumschiffen und Nutzlast dient. Diese Einheit ist mit Hilfe von Winden selbst zentrierend.:
Inner Ring structure held with threads in the Outer Ring
Der STS
Ultraleichte Konstruktion aus dünnem "Segeltuch", ein aus karbon-faser-verstärktem Kunststoff gefertigter ultraleichter Kunststoff-Außenring, in dem karbonfaser-verstärkte Halte- und Tragegurte bzw. eine Bespannung, die das Segel trägt, befestigt sind, kennzeichnen den Segel-Antrieb des Fahrzeuges.
Ergänzt wird der Segelantrieb durch am Außenring befestigte Doppelthruster-Einheiten (in der Regel mit solar-elektrische Antrieben), die durch gegenläufige Montage in einem gemeinsamen Strahlrohr jeden Schub durch Gegenschub in die entgegengesetzte Richtung wieder abbremsen können, ohne dass das Raumfahrzeug gedreht werden muß. Werden genug dieser Thrustereinheiten eingesetzt, kann das Raumfahrzeug somit auch in jede gewünschte Lage kontrolliert gedreht und kurzfristig in jede gewünschte Richtung beschleunigt werden. - Dies sogar ohne bewegliche Thrusterhalterungen, rein durch Schub und Gegenschub.
Ein derartiges Thrusterring-Raumfahrzeug ohne Segel wäre somit dank der Verwendung schubschwacher solarelektrischer Thruster höchst manövrierfähig. Dennoch dürfte die Verwendung mit Segel die vielversprechendste Form des STS sein, weil das Raumfahrzeug dadurch mit deutlich weniger Treibstoff auskommen kann als ein rein solarelektrisch angetriebenes Raumfahrzeug, wie z. B. Smart I der ESA und dennoch im Bedarfsfall nicht auf die hier sogar noch verbesserte Manövrierfähigkeit der Thrusterantriebe verzichten muß.
Durch einen in das Zentrum der riesigen, tellerförmigen Fläche des Raumfahrzeuges am Außenring eingehängten Innenring wird der STS zum vielseitig verwendbaren Allzweckraumfahrzeug, wie z. B. einen Tranporter für Satellitenschwärme, ein Weltraum Frachtschiff, ein Weltraum-Container-Schiff oder ein Weltraum-Schlepp oder Reparatur-Fahrzeug. Der Innenring dient als Docking- und Ladeplattform, denn in seinem Inneren können Tochter-Raumfahrzeuge eindocken und wieder ablegen, sowie am Rohrgerüst des Ringes Gerätschaften (insbesondere elektrische Winden) zur Befestigung und Manipulation von Ladung angebracht werden.
Wegen der zentrischen Montage des Docking- und Lade-Innenringes entstehen nur geringe "Unwuchten" und die Ladung stört daher weniger beim Manövrieren des Raumfahrzeuges.
Durch (ferngesteuerten bzw. robotischen) Austausch der Tochtereinheiten kann ein Trägerschiff sehr einfach für einen anderen Verwendungszweck umgerüstet werden. So wäre es denkbar, dass z. B. Universitäten sogar ihre eigenen Weltraumprojekte im inneren Sonnensystem durchführen, indem sie lediglich die Tochtereinheit anfertigen und diese dann von den Weltraum-Agenturen launchen und mit deren Mutterschiffen zum Einsatzort transportieren lassen, wo sie dann wieder die Steuerung des Tochterschiffes übernehmen.
Vergleich
|
Im Gegensatz zu den zur Zeit aktuellen Solarseglern, die auf rotierenden (spinning disk sails) bzw. beweglichen Solarsegeln basieren, kann der STS auf der gesamten Fläche seiner Scheibe Nutzlast aufnehmen, die an den Tragegurten einfachst zu befestigen ist. Zusätzlich ist jedoch die Verwendung einer Innenring-Konstruktion als Docking und Ladestation möglich, die sogar automatisches Andocken und Ablegen zuläßt. Da er sich hierdurch besonders für den Nutzlast-Transport eignet, kann er mit dem Pfund des Solarseglers, die kostenlos von der Sonne gelieferte Antriebsenergie, wuchern; denn bei Transportleistungen kommt es besonders auf die entstehenden Betriebskosten an. Der STS kann somit als besonders kostengünstiger Raumtransporter nicht nur in Bezug auf die Herstellungskosten sondern insbesondere auch auf die Transportkosten angesehen werden. Sieht man sich die bisherigen Solarsegler-Konzepte an, kommt als einzige Solarsegel-Bauform, die sich auch für den Transport von Nutzlasten in größerem Umfang eignet, der quadratische Mastensegler mit sich kreuzenden bzw. zum Zentrum des Seglers führenden Mittelmasten als Weltraum-Transportfahrzeug in Frage. So basierte z. B. der Vorschlag zur Durchführung eines Rendezvous-Manövers mit dem Komet Halley durch NASA/JPL auf dem Konzept eines quadratischen, durch gekreuzte Masten gespannten 800 x 800 m Solarsegels, das für eine Nutzlast von 850 Kg konzipiert war. Die Realisierung wurde jedoch wegen des mit der Entfaltung der Maststruktur verbundenen Risikos abgelehnt. Das dieses Risiko nicht unterschätzt werden darf, zeigt auch ein Teilfehlschlag, der sich bei der Entfaltung einer viel kleineren Struktur, einer aufblasbaren 14-m-Antenne (IAE) während der Space-Shuttle Mission STS-77 im Jahre 1996 ereignete. Der Thruster-Solarsegler vermeidet jedoch die Selbstentfaltung vollständig und damit auch das entsprechende Risiko. Die hiermit vorgestellte Entwicklung bietet jedoch über die Risiko-Minimierung hinaus, bessere Lade- und Befestigungsmöglichkeiten und durch die Kombination mit dem Thruster-Ring eine erheblich verbesserte Manövrierfähigkeit. Nicht zuletzt ermöglicht er auch insbesondere bei einer Trägerschiff- Lander- Variante die Landung auf Monden und Asteroiden mit geringer Schwerkraft.
|
Die spezielle Anordnung von gegenläufigen Doppelthrustern in gekoppelten Antriebspaaren, sind die Hauptkennzeichen des Steuerungsteiles der Erfindung. Dieser ermöglicht nicht nur eine umfassende Feinsteuerung sondern er kann auch unabhängig vom Solarsegel als Antrieb in Schattenbereichen oder außerhalb des Nutzungsbereiches des Photonantriebes Verwendung finden.
Das Raumfahrzeug hat die Form einer fliegenden Untertasse. Dennoch war es nicht die ursprüngliche Absicht ein UFO zu entwickeln. Nach Auffassung des Autors und Erfinders ist die Form einer (allerdings sehr flachen) fliegenden Untertasse jedoch die mit unserer heutigen Technik am günstigsten und effektivsten zu verwirklichende Variante eines Solar-Segels.
Trotz der Scheibenform besteht jedoch ein wesentlicher Unterschied zu der in der UFO-Literatur üblichen Bauweise. Der STS hat keinen abgeschlossenen Laderaum. In den Ring sind lediglich die Haltegurte mit dem Segel gespannt.
Diese "primitive" Bauweise hat jedoch ganz entscheidende Vorteile. Zunächst einmal ist sie kostengünstiger und einfacher zu bewerkstelligen. Die fehlenden Laderaumwände sind jedoch besonders nützlich. Ohne jegliche Größenbegrenzung können zu transportierende Güter direkt an den Tragegurten befestigt werden. Keine Laderaumwand behindert die Zuladung; Be- und Entladen sind besonders einfach und schnell zu erledigen. Eines der größten Probleme der Raumfahrt, nämlich das Raumproblem ist hiermit zumindest für den außerplanetarischen Verkehr gelöst.
Ebenso ein weiteres Problem der bemannten Raumfahrt, die fehlende Schwerkraft. Bei Verwendung eines rotierenden Solarseglers als Plattform des Raumschiffes können die Wohn- und Arbeitskabinen genau an einer Stelle der Plattform an den Haltegurten befestigt werden, an der die gerade gewünschte Schwerkraft herrscht.
Das starre, ringförmige Außengerüst, das gleichzeitig als Halterung für Ionen-Antrieb und Solarsegel dient, gibt dem Segler trotz feststehender, nicht beweglicher Thruster eine hohe Manövrierbarkeit ohne die Fehleranfälligkeit selbstentfaltender Baumstukturen, die bei den derzeit geplanten Solar-Segel-Modellen Verwendung finden sollen.
Falls Sie nun überlegen, dass dies sicherlich sehr wenig Treibstoff sein wird, bitte ich zu bedenken, dass die Ionen-Thruster sehr effizient sind und daher wenig Treibstoff verbrauchen und vor allen Dingen, dass sie im Idealfall nur dazu benötigt werden, das Solarsegel in die richtige Richtung zu drehen. Den eigentlichen Antrieb übernimmt in der Regel das Solarsegel mittels kostenfreien und im freien Raum ständig verfügbaren Lichtdruckes.
Im übrigen sind die steckbaren Doppelthruster-Einheiten durch einfaches Austauschen der kompletten Einheit einschließlich Tank "nachtankbar" . Ein derart ausgestatteter Segler kann daher potentiell immer wieder für neue Missionen verwendet werden.
Zusammen mit der in Fig. 1 dargestellten symmetrischen Verteilung der Doppel-Thrustereinheiten mit jeweils genau auf der anderen Ringseite gegenüberliegenden gleichartigen Schwestereinheit ermöglicht dies, das Raumfahrzeug allein durch Schub und Gegenschub in jede gewünschte Lage zu drehen und anschließend in jede gewünschte Richtung anzutreiben, ohne dass hierfür bewegliche Thrusterhalterungen erforderlich wären. Versuchen Sie sich das einmal bei einem raketenförmigen Raumfahrzeug vorzustellen. Auch das Abbremsen eines bisherigen Schubes ohne vorherige Drehung ist im Gegensatz zu einer Rakete möglich.

| Fig. 2.d zeigt eine typische Ionen-Doppelthruster-Einheit von Innen mit den entgegengesetzt angeordneten Ionen-Triebwerken und den Zugang des Treibstoffes von der gemeinsamen Halterungs-/Tank-Einheit. |
Nun mag man die unbestritten höheren Gewichtsanteile, die durch das zahlreiche Mitführen wenn auch kleinerer Thruster nebst Treibstoffvorrat als widersprüchlich zur angestrebten möglichst ultraleichten Bauart eines Solarseglers ansehen.
Dieser Nachteil wird jedoch bei weitem durch die Vorteile dieser vorgestellten Hybrid-Antriebsart aufgewogen.
Bei sehr großen Strukturen, deren Fläche durch die Einfachheit der Segmentbauweise und des Segment-Transportes in den Weltraum im Quadratkilometer-Bereich liegen können, dürften ein paar Thruster mehr oder weniger die Gewichtsbilanz nicht allzu stark belasten.
So hat das nach derzeitigen Annahmen von der Nutzlast des Space-Shuttles her größtmögliche in das All zu befördernde quadratische Solarsegel eine Fläche von ca. 2 x 2 km und eine Masse von 19200 kg. (Solar Sailing, Colin R. McInnes, Springer Verlag, S.22)
Dieses Segel könnte theoretisch eine Nutzlast von 32000 kg von der Erde zum Mars innerhalb von 4,2 Jahren anliefern und sodann innerhalb von 2 Jahren wieder zur Erde zurückkehren.
An dieser hohen Nutzlast ist schon zu sehen, daß der Gewichtsanteil für den zusätzlichen Antrieb mit zunehmender Größe selbst bei Erhöhung der Zahl der Thruster-Einheiten immer kleiner wird.
Bezüglich der verschiedenen verwendbaren Thruster-Entwicklungen sei insbesondere auf die Antriebsart der Ionen-Thruster hingewiesen.
Diese sind derzeit von der erreichbaren Geschwindigkeit von ca. 30 km/Sek. (allerdings wegen der geringen Leistung erst nach langer Beschleunigung), der möglichen Dauer des Einsatzes und des erheblich niedrigeren Treibstoffbedarfes den bisher verwendeten chemischen Raketenantrieben haushoch überlegen.
Auch der große Nachteil des Ionen-Antriebes, die derzeit noch recht geringe Leistung ist vorliegendenfalls sogar erwünscht, da eine Verwendung der Thruster hauptsächlich zur Steuerung und Lageausrichtung erfolgen soll. Hierbei werden wegen der nötigen Feinsteuerung eher geringe, einfacher zu regulierende Antriebskräfte benötigt.
Wie können die doch recht schwachen Kräfte von Ionen Thrustern die Steuerung eines derart großen (wenn auch in ultra-Leichtbauweise ausgeführten) Gebildes übernehmen?
Das Außengerüst, also der Ring, an dem die jeweils sich gegenüberliegenden antreibenden (Ionen-) Thruster-Paare befestigt sind, stellt einen immensen Hebel für jeden der zwei gleichzeitig eingesetzten Steuerungsthruster dar. Nimmt man das weiter oben angeführte Riesensegel von 4 Mio. qm Fläche als Beispiel, bei dem das gesamte Gewicht übertrieben dargestellt in einem Punkt in der Mitte liegen würde, ergäbe sich bei einem runden Segler ein Radius von ca. 1130 m vom antreibenden Thruster bis zum Massepunkt.
Versucht man nun die Nutzlast in der Mitte zu konzentrieren, z. B. auf einer im Zentrum angebrachten Nutzlast-Plattform von 10 m Durchmesser, läge der Hebel für diese Nutzlast (Strecke vom Rand der Nutzlastplattform zum Thruster) immer noch bei 1125 m für jeden der mindestens bei einer Drehung eingesetzten zwei Steuerungsthruster.
Einen derart mächtigen Hebel hat es meiner Meinung nach noch in keiner technischen Anwendung gegeben.
Natürlich befindet sich nicht sämtliche zu bewegende Masseteile im Zentrum der Scheibe. Die außerhalb der Nutzlastplattform liegenden Teile sind jedoch hauptsächlich ultraleichte Carbonfaserrohre, Carbonfasergurte und natürlich die Thruster mit ihrem Treibstoff.
Da die Thruster samt Treibstoff die größten Gewichtsanteile außerhalb des Zentrums ausmachen, müssen diese zumindest in der Lage sein, sich selbst und den Treibstoff durch den Raum zu bewegen. Dies haben Ionen-Thruster, die bereits wiederholt mit Erfolg bei Steuerung und auch Antrieb von Satelliten eingesetzt wurden ausreichend bewiesen. Sie schaffen es sogar, Raumfahrzeuge mit mehreren hundert Kilogramm Masse anzutreiben.
Ein entscheidender Vorteil der Thrusteranbringung an einem Außenring, also am äußersten Rand des Raumfahrzeuges, ist somit der immer und für jeden am Ring befestigten Thruster vorhandene große Nutzlasthebel, der dadurch die Verwendung schwächerer und leichter Antriebe für die Steuerung ermöglicht. Wegen der nur minimal erforderlichen Kraftanwendung kann daher auch der notwendige Treibstoffvorrat verringert oder die Missionsdauer verlängert werden.
Der eigentliche Antrieb, bzw. Vortrieb des Solar Thruster Seglers (STS) erfolgt im Normalfall jedoch durch die Krafteinwirkung der Sonnenstrahlung auf das Segel und verwendet hierfür keinerlei mitzuführenden Treibstoff.
Sehen wir uns zum Vergleich nun einmal die Steuerung eines derzeit geplanten Solarseglers an. Hier soll durch einen Antrieb, der an einem Mast im Zentrum des Segels angebracht ist, die Neigung des Seglers zur Sonne verändert und hierdurch gesteuert werden. Dies hat den unbestreitbaren Vorteil, daß nur eine einzige Steuereinheit benötigt wird.
Allerdings setzt hier die Kraft nicht wie bei dem STS im Außenbereich der Konstruktion und somit unverstärkt, sondern durch den Hebel in der Form des Mastes vervielfacht, direkt im Zentrum des Seglers an. Die Befestigung des Mastes (und auch der Mast selbst) stellt somit eine Sollbruchstelle dar, die wegen der auftretenden hohen, punktförmigen Krafteinwirkung entsprechend verstärkt werden muß, insbesondere auch wegen evtl. Ermüdungserscheinungen durch Vibrationen.
Bei kleineren Seglern ist dies sicherlich hinnehmbar. Größere Segler, die für den Lastentransport im Weltall jedoch unbedingt erforderlich sind, dürften mit einer derartigen Steuerung jedoch nicht realisierbar sein. Der Ring, als Außenskelett, Tragegerüst und Aufnahmemedium aller möglichen Einsätze und Additionen (z. B. Thruster, Meßgeräte, Spulen, Magnete, Schleuderkonstruktionen) in nahezu beliebiger Zahl ist m. E. ein unverzichtbares Merkmal eines großen Solarseglers.
Ein Erfordernis der Erfindung ist gerade wegen der gewichtserhöhenden Thrustersteuerung eine im übrigen möglichst leichte Bauweise, so dass kleine, leichte Thruster und ein geringer Kraftstoffbedarf zur Verringerung der mitzuführenden Kraftstoff-Masse unbedingt notwendig sind.
Derzeit in Satelliten verwendete Ionen-Thruster haben oft einen Durchmesser von etwa 10 cm, sind also schon relativ klein. Es wurden jedoch bereits Ionen-Thruster mit den Ausmaßen von ca. 3 mal 5 cm (der MicroWave Thruster vorgestellt 1997 durch das Discovery Magazin, entwickelt von Michael Miccio von der Firma Aerospace Engineering) und von 7 cm Durchmesser entwickelt.
Sogar winzig kleine Micro-Thruster (digitale Thruster) von der Größe eines Mohn-Samens wurden bereits erprobt und könnten für kleine sehr leichte Thruster-Solar-Segler in der Zukunft zum Einsatz kommen.
Die hiermit vorgestellte Erfindung verwendet Thruster, ist jedoch nicht auf eine spezielle Art festgelegt. Lediglich die Anordnung und Anbringung wie unter Fig. 1 und Fig. 2.a bis 2.d dargestellt, gehört zum Anspruch dieses Thruster-Lichtdruck-Seglers.
Als Treibstoff wäre derzeit Xenon-Gas wegen seiner Ungiftigkeit und fehlenden Explosionsgefahr sicherlich eine gute Wahl.
Das Solarsegel nutzt den Druck der von der Sonne ausgehenden Lichtstrahlen als kostenfreie und reichlich vorhandene Antriebsenergie. Dieser ist zwar sehr gering aber doch meßbar. Daher muß das Fahrzeug eine möglichst große Segelfläche bei möglichst niedrigem Gewicht aufweisen.
Die Abschwächung/Verstärkung der Sonnenstrahlung (solar flux) kann in etwa nach der Formel 1/ r ^2 errechnet werden, wobei r die Entfernung des Objektes zum Mittelpunkt der Sonne ist.
Wie auch die Gravitation nimmt die Kraft des Lichtdruckes mit zunehmender Annäherung an die Sonne im umgekehrten Quadrat zum Abstand zur Sonne zu, das heißt konkret, bei einer Halbierung der Erde/Sonne-Enfernung, also etwa auf Höhe des Planeten Merkur hat sich die Stärke des Photonen-Drucks bereits vervierfacht.
Eine weitere Halbierung, was auch wegen der Hitzebelastung des Raumfahrzeuges derzeit die Grenze des machbaren zu sein scheint, ergiebt nochmals eine Vervierfachung der einwirkenden Kraft, somit den sechzehnfachen Wert dessen, der auf Höhe der Erde gemessen werden kann.
Was liegt daher näher als die Nähe der Sonne zu suchen, um dort eine möglichst hohe Geschwindigkeit zu erzielen und diesen Schwung dann für das Erreichen des anvisierten Zieles auszunutzen?
Nicht auszudenken, welche enormen Kräfte und Beschleunigungen bei einer weiteren Halbierung der möglichen Entfernung zur Sonne durch Entwicklung noch hitzebeständigerer Materialien freigesetzt werden könnten.
Leider gilt die Potenzierung der Lichtkraft auch umgekehrt, das heißt die Kraft der Sonnenstrahlung hat sich bei etwa der dreifachen Enfernung Erde/Sonne soweit verringert, das sie kaum noch nutzbar ist. Daher kann eine Mission in Richtung zu den sonnennahen Planeten Venus oder Merkur oder zur Sonne und zurück selbst mit erheblich höheren Reisegeschwindigkeiten erfolgen, als zum weiter von der Sonne entfernten Planeten Mars.
Mars liegt jedoch auch noch im Wirksamkeitsbereich der dreifachen Erde/Sonne-Entfernung (AU). Eine Solarsegler-Mission zum Mars und anschließende Rückkehr zur Erdumlaufbahn ist daher unter Ausnutzung der kostenlosen Antriebsenergie der Sonnenstrahlung grundsätzlich unter Hinnahme längerer Missions-Dauer "preiswert", das heißt ohne nennenswerten Kraftstoff-Verbrauch möglich.
Weiter über den Wirksamkeitsbereich von 3 AU hinausgehende Missionen sollten daher zunächst die Nähe der Sonne suchen und mit der dort gewonnenen Geschwindigkeit das entfernte Ziel anstreben. Hierbei sind grundsätzlich deutlich höhere Geschwindigkeiten als mit chemischen oder auch mit Ionenantrieben möglich.
Um einen außerhalb des Sonnensystems liegenden Stern zu erreichen, würde eine Raum-Mission zunächst einmal unsere Sonne ansteuern , um dort die benötigte Geschwindigkeit zu erlangen.
Wie der Diskus eines Diskuswerfers wird der Segler dann bei hoher Geschwindigkeit aus den Fesseln der Sonnen-Schwerkraft in Richtung des Zielsterns entlassen und erhält dabei durch den Lichtdruck der Sonnenstrahlung einen starken Beschleunigungs-Stoß.
Während der jahrelangen Reise ist keine weitere Energie zur Navigation erforderlich, der Segler behält einfach seine einmal erworbene Geschwindigkeit bei und beendet auf der weiten Anreise sämtliche Aktivitäten. Erst wenn der Zielstern erreicht ist, erwecken die Solarzellen unter Verwendung der Strahlung des angesteuerten Sternes den Ionenantrieb und die Elektronik wieder zum Leben.
Mit Hilfe des Lichtdruckes des Zielsternes bremst der Segler sodann ab und kann seine Forschungsmission durchführen, sowie ggf. in der vorstehend beschriebenen Art zur Sonne zurückkehren.
Sollte es weiteres intelligentes Leben im Weltraum geben, wäre es denkbar, daß Besuche der Erde auf genau die gleiche Art erfolgen, das heißt, zunächst würde erst einmal die Sonne zum Abbremsen der Fahrt angelaufen.
Art der Steuerung und Manövrieren
Obwohl die Sonnenstrahlung das Segel eigentlich von der Sonne wegdrückt, ist ähnlich wie beim Segeln eine Art des "Kreuzens" möglich.
Wie auch beim Segeln bei dem das Schwert den Gegendruck zum Wind erzeugt, der es bei normalen Segelbooten (High Performance Segler können noch enger am Wind segeln) erlaubt, etwa bis auf 45 Grad gegen den Wind anzusegeln, ist auch hier eine Gegenkraft vorhanden, nämlich die Gravitation.
Allerdings geht man zur Zeit davon aus, das der Vektor des Lichtdrucks nicht auf 45 Grad, sondern lediglich auf 90 Grad zur Sonne umgelenkt werden kann. Dies reicht jedoch, um die Umlaufgeschwindigkeit des Raumfahrzeuges um die Sonne je nach Richtung der Ablenkung (positive oder negative Neigung des Segels) zu erhöhen oder zu vermindern.
Eine Verminderung der Umlaufgeschwindigkeit durch eine negative Neigung des Segels bewirkt aber immer eine Annäherung an die Sonne. Wie beim Segelboot reicht eine kleine einfache Drehung des Fahrzeuges aus, um die Bewegung in eine andere Richtung, hier in Richtung Sonne in Gang zu setzen, die das Raumschiff viele Millionen Kilometer Weg zurücklegen läßt, ohne das es nach der ersten Drehung auch nur ein einziges Gramm weiteren Treibstoffes hierfür bedarf!
Eine weitere Drehung kann dann wieder die Umkehr weg von der Sonne bewirken, jedoch diesmal wegen des viel stärkeren Lichtdruckes in der Nähe der Sonne mit einer z. B. 100mal höheren Anfangs-Beschleunigung. Derartige Manöver lassen sich zudem noch mehrfach wiederholen, ohne das der Treibstofffvorrat merklich reduziert wird.
Insbesondere solche Manöver machen die Stärke des Solarsegel-Antriebes aus, die weder durch den Ionen-Antrieb und erst recht nicht durch chemische Antriebe erreicht werden können.
Übrigens erreichen High-Performance-Segelboote oft Geschwindigkeiten, die das Doppelte der Geschwindigkeit des antreibenden Mediums, (hier des Windes) übersteigen. Es soll mit dieser Aussage nicht suggeriert werden, die doppelte Lichtgeschwindigkeit sei durch Solarsegeln erreichbar :-), aber so ganz ausschließen möchte ich das von meinem Wunschdenken her gesehen natürlich auch nicht.
Es bleibt die Hoffnung, das sich der Solardruck-Vektor vielleicht doch noch in Richtung Sonne lenken läßt und dadurch überraschende Resultate ermöglicht. Wegen der hervorragenden Steuerungsmöglichkeiten würde die hier vorgestellte Erfindung gute Voraussetzungen zur Entdeckung hierzu geeigneter Segeltechniken bieten.
Wie wird nun die vorstehend bezeichnete "Drehung" zur Ausrichtung des Solarsegels erzielt?
Fig. 1 zeigt einen Photonensegler mit extern am Antriebsring 1 nach außen befestigten Doppelthruster-Anordnungen. (Thruster 1.6 für oben/unten Strahlrichtung, Thruster 1.5 für seitliche Strahlrichtung nach links und nach rechts). Siehe hierzu auch Fig. 2.a, 2.b und 2.d.
Jedem Thrusterpaar ist jeweils ein gekoppeltes Paar auf der Gegenseite des Ringes genau gegenüberliegend zugeordnet. Die Thruster werden immer gleichzeitig in Paaren gezündet. Dabei ist einem Thruster der einen Einheit der entgegengesetzt zündende der Gegenseite zugeordnet.
Soll nun eine Drehung des Fahrzeuges um die Mittelachse erfolgen, könnte z. B. auf der einen Seite des Ringes der oben liegende Thruster einer Thrustereinheit 1.6 und auf der anderen Seite der unten liegende Thruster der gegenüber-liegenden Thrustereinheit 1.6 gezündet werden.
Nun würde das allein allerdings zu einer ungewollten Rotation um die eigene Achse führen. Daher wird kurz vor Erreichen der gewünschten Lage die Strahlrichtung umgedreht.
Das heißt, nunmehr werden der unten liegende Thruster auf der einen und der oben liegende Thruster auf der anderen Seite mit genau dem gleichen Impuls wie das erste Thrusterpaar gezündet. Die Lageänderung in die gewünschte Position ist damit vollbracht.
Bei großen Antriebsringen mit vielen Antriebseinheiten ist selbstverständlich die Zündung mehrerer nebeneinanderliegender Thruster zur besseren Feinsteuerung möglich.
Genau die gleiche Technik wird bei Drehungen um den Pol der Scheibe also einer seitlichen Drehung mit Hilfe der Thruster 1.5 vollzogen. Fig. 2.a und Fig. 2.b zeigen nochmals näher die Ausrichtung der Doppelthruster oben/unten und rechts/links. Fig. 2.d zeigt die entgegengesetzte Anordnung der beiden einzelnen Thruster in einer Doppel-Einheit anhand einer typischen Ionen-Thruster-Ausführung.
Die Thruster 1.5 ermöglichen es auch, das Raumfahrzeug zur Lagestabilisierung in - diesmal erwünschte - Rotation zu versetzen.
Die obenstehende Zeichnung ist wegen der riesigen Ausmaße des STS alles andere als maßstabsgerecht. Bei einer Fläche des Raumfahrzeuges von z. B. zwei Quadratkilometer würde der Außenring von etwa 6-8 cm Durchmesser allenfalls noch als dünner Strich zu zeichnen sein. Die wichtigsten Teile der Konstruktion würden bei einer Zeichnung im Maßstab fehlen und sind deshalb im Verhältnis zur Gesamt-Fläche des Objektes erheblich überdimensioniert.
Um derart große Strukturen im Weltraum zu erstellen, ist es das einfachste, Sie in Segmente einzuteilen, die auf der Erde hergestellt und im Weltraum zusammengefügt werden. Das vorgestellte Ring-Segment-System (RSS) ermöglicht den einfachen Zusammenbau des tragenden Halteskelettes.
Der Transport der Segmentteile (Rohre) in den Weltraum erfolgt mittels eines Aufsatzes auf dem Launcher, dem Launcher-Transport-Kopf (LTH), der die Befestigung auf der Launcher-Außenhaut ermöglicht.
Vorteile der engen Verbindung von Thruster-Technologien mit der Solar-Segel-Technik.
Zunächst einmal werden Thruster ohnehin zur Steuerung des Segels dringend benötigt. Dies ermöglicht einmal die notwendige Feinsteuerung zur Entwicklung ausgefeilter Segeltechniken und sodann auch deren Anwendung.
Ionen- und auch andere Thruster können jedoch auch ohne Segeleinsatz das Fahrzeug antreiben und stellen somit insbesondere in sonnenfernen oder Schatten-Bereichen ein unabhängiges Antriebsmittel dar und ermöglichen einen Antrieb in Bereichen, die dem Solarsegel verschlossen sind.
Wie schon erwähnt können Thruster auch Rotation zur Lagestabilisierung erzeugen.
Ebenfalls kann diese Rotation zur Erzeugung künstlicher Schwerkraft verwendet werden. So ist das Einhängen einer Raumstation an einer rotierenden Ringstruktur in genau der Entfernung vom Mittelpunkt möglich, in der die gewünschte Schwerkraft erzeugt wird.
Weitere Nutzungen der Rotation sind nachfolgend noch zu „Experimentelles Flug Objekt" und „Rotations-Schleuder" beschrieben.
Weiterhin eröffnen Thruster die Möglichkeit zur direkten Landung auf und Start von gravitationsschwachen Objekten, wie z. B. Asteroiden oder Monden.
Ein zusätzlicher Aspekt der Thrusterverwendung in Solarsegelprojekten, der keinen technischen Hintergrund hat, soll nicht unerwähnt bleiben.
Die Solarsegel-Technologie wurde bereits seit Anfang der 20er Jahre angedacht und theoretisch fortentwickelt. Die Technologie ist derzeit überreif zur praktischen Erprobung! Dennoch kam sie bisher nie zum Einsatz. Projekte, die einseitig auf Masse ausstoßende Antriebe setzten, erhielten bisher immer den Vorrang.
Die Wahl lautete immer, entweder Solarsegel-Projekt oder herkömmlicher bzw. masseausstoßender Antrieb.
Mit der vorliegenden Entwicklung kann es jetzt sowohl als auch. heißen.
Antriebe in Form von Thrustern sind beim Thruster-Solarsegler reichlich vorhanden.
Für Lobbyisten von Firmen, die Antriebe fertigen, gibt es daher keinen Grund, die Weiterentwicklung der Solarsegel-Technologie zu behindern.
Im Gegenteil, der Erfolg der vorgeschlagenen Hybrid-Anwendung würde auch ihnen nützen und sie sollten alles daran setzen, das hierfür ausreichende Mittel zur Verfügung gestellt werden. Und zwar auch in Hauptanwendungen und nicht nur als zusätzliche geduldete Nutzlast im Piggy-Back-Verfahren!
Montage der Ringstruktur im All und die damit verbundenen Vorteile
Durch Zerlegung des starren Außenringes in rohrförmige Segmente, ( siehe Fig 1, Teile 1.1 bis 1.3) die vorzugsweise aus ultraleichtem carbonfaserverstärktem Plastikmaterial gefertigt sind, ist die Endmontage im All möglich. Die Segmente sind an einer Seite verdünnt und werden einfach beim Zusammenbau wie Abwasser-Rohre ineinander gesteckt.
Mit einer kontermuttergesicherten Splintstange 1.8 (ohne Zeichnung), die vollständig durch die ineinandergesteckten Rohrsegmente durchgeführt wird, erfolgt die endgültige Befestigung. Diese Splintstange dient auch zur Befestigung der Einzelsegmente am Launcher-Transportkopf 4.1.
Mit Hilfe der in Fig. 4.a und 4.b dargestellten ein- und mehrlagigen Launcher-Köpfe, die den ASAP-Strukturen an der Ariane 5 ähneln, können die Gerüstsegmente selbst sehr großer Ring-Strukturen an der Außenwand der letzten Launcher-Stufe zum Ort des Zusammenbaus tranportiert werden.
Fig. 4.a
|
Fig. 4.b
|
Neu ist, das die Transportkopf-Halterung 4.1 (s. Fig. 4.c) die Gegenrohrenden für die zu transportierenden Rohrsegmente enthält und das Einhängen, Aushängen und die direkte Entnahme der Rohre von außen - wo sie bei der Montage auch benötigt werden - erfolgt.
Fig. 4c
|
Das Raumproblem, das bei vielen Missionen wegen der großen Schubkraft der Trägerraketen oft schwerwiegender als das Gewichtsproblem ist, ist hiermit gelöst. Weiterer Vorteil des Zusammenbaus ganzer Raumfahrzeugstrukturen aus standardisierten Rohrsegmenten ist die Möglichkeit der Massenproduktion, geringerer Anteil von Fehlerquellen, schnellerer, fehlervermeidender Zusammenbau ,sowie schnellere und weniger fehleranfällige Planungsabläufe. Ein zusätzlicher Vorteil ist, daß der Transport wegen des geringen Gewichtes der Segmente ggf. auch im Piggy-Back-Verfahren als Nebenladung zu einer Hauptmission erfolgen kann. Bei einem Außendurchmesser der letzten Stufe des Launchers von 4 m und einem angenommenen Durchmesser der Segmente von 6 cm können mit einem einlagigen Ring (s. Fig. 4.a) ca. 200 Segmente transportiert werden. Die Krümmung der Segmente wirkt sich hierbei mit zunehmender Größe der Ringstrukturen immer weniger aus, so das der Launcherstart nicht durch die Sperrigkeit der außen angebrachten Rohrsegmente behindert wird. Bei einer angenommenen Segmentlänge von 15 m, also bei 200 Stück einer Gesamtlänge von 3000 m und einer Wandstärke von 1 mm würde sich ein komprimiertes Massevolumen einer Ringlage von ca. 0,6 Kubikmeter carbonfaserverstärkter Kunststoffmasse ergeben. Abhängig vom spezifischen Materialgewicht sicherlich keine Masse, die einem Launcher Probleme bereiten dürfte. Dies gilt selbst dann, wenn ein mehrlagiger Transport-Kopf analog Fig. 4.b mit mehr als 1000 Segmenten verwendet wird, der für die Versorgung eines Großprojektes ausreichen, sowie einige Reserve-Segmente übriglassen würde. Das Zusammenfügen der Ringsegmente erfolgt vorzugsweise an einer Haltevorrichtung an der Außenwand der ausführenden Raumstation, die das Durchziehen des bereits zusammengefügten Ringteiles zur weiteren Montage ermöglicht. Diese Montage könnte in der Anfangsphase von Astronauten durchgeführt werden, später jedoch hauptsächlich durch hierfür konstruierte Automaten, bzw. Roboter. Hierbei werden zunächst 2 Halbringe montiert, die dann zum Abschluß ineinandergesteckt werden.
|
Diese Einheit wird dann mittels der Splintstangen, die vollständig durch das Rohrsegment gesteckt werden, an diesem befestigt. Die endgültige Sicherung erfolgt dann mittels des Konter-Halbrohres 1.9.2 und Kontermuttern.
Die Montage des Segels von Hand durch mehrere Astronauten dürfte einfacher und für das Segel schonender als die automatische Selbstentfaltung nach dem Launchen sein.
Dabei ist das Segel und die Ringstruktur mit der Kante zur Sonnenstrahlung zu platzieren, damit das noch unvollendete Raumfahrzeug nicht unbeabsichtigt Fahrt aufnimmt oder das Segel abtreibt, bzw. beschädigt wird.
Die Haltegurte können vorzugsweise aus ultraleichtem Carbonfaser-Material gefertigt werden, die die begrüßenswerte Eigenschaft einer höheren Zugfestigkeit als Stahl besitzen. Sie sind daher für die Aufnahme von Lasten bestens geeignet.
Nach Montage der Antriebseinheiten und des Segels erfolgt sodann die Befestigung der Solarzellen auf der Vorderseite des Segels. In Fig. 1 wurde für jede Doppelthruster-Einheit ein eigener Solarzellenkomplex direkt in der Nähe vorgesehen, sowie ein Solarzellen-Ring in der Mitte der Scheibe für die Stromverbraucher der Nutzlast.
Alternativ ist die Vorbeschichtung des Segels mit flexiblen Solarzellen an den gewünschten Stellen möglich, so daß eine Montage in diesem Fall nicht mehr nötig ist (s. hierzu auch US-Patent 6,194,790 vom 27.02.2001.
Es verbleibt dann nur noch die Durchführung der Stromanschlüsse für die Thruster über Verschraubung mit den Splintstangen 1.9.3 nach Fig. 2.c und die Platzierung sowie Installation der Nutzlast und das Raumfahrzeug ist einsatzbereit.
Empfehlenswerte Literatur bezüglich möglicher Orbits und physikalischer Zusammenhänge:
Solar Sailing, Technologie, Dynamics and Mission Applications von Colin R. McInnes, Springer-Verlag 1999.
In diesem Buch dürfte auch der derzeitige technische Stand und die entwickelten Anwendungs-Modelle des Solar-Segelns weitgehend beschrieben sein.
Eine noch komplettere Aufzählung der derzeit bekannten Solar-Segel-Modelle und -Missionen beinhaltet der von Dr. Robert L. Forward für das Jet Propulsion Laboratory (JPL) erstellte Report „Solar Sail Mission Requirements" vom 12.01.2000, der frei im Internet herunterladbar ist oder über email bei forward@whidbey.com angefordert werden kann.
Ein Modell, das nur annähernd dem hier vorgeschlagenen ähnelt, konnte in der genannten Literatur nicht entdeckt werden. Auch Science-Fiction-Literatur, die ein untertassenförmiges UFO mit einer (wenn auch High-Tec) Segelplane im Antriebsring beinhaltet, ist dem Erfinder nicht bekannt; vielleicht erhalte ich ja hierzu noch Hinweise meiner Leser.
Es ist anzumerken, das es sich bei sämtlichen in der Solarsegel-Literatur erwähnten Modellen auch tatsächlich um solche handelt, die bisher noch nie im All eingesetzt worden sind.
Patente für solare Antriebssysteme wurden jedoch bereits erteilt, z. B. US-Patent Nr. 4,614,319 vom 30.09.1986 bezüglich eines einfachen Solar-Segel mit einer Spannungstrosse an deren Ende die Nutzlast befestigt ist. In der genannten Patentschrift wird auch ein kurzer Abriß der englischsprachigen Solarsegel-Modelle (u. a. auch Science Fiction) bis zur Patentschrift gegeben.
US-Patent Nr. 6,194,790 vom 27.02.2001 betrifft ein Solar-Segel, daß durch Kombination mit einem flexiblen Dünnschicht-Solarzellen-Film zur Stromerzeugung gedacht ist, jedoch auch zur Fortbewegung verwendet werden kann. Dieses Patent könnte natürlich eine willkommene Ergänzung zur Stromversorgung der in der vorliegenden Erfindung verwendeten Ionen-Thruster sein.
Das erste Solar-Segel, das voraussichtlich zum Einsatz kommen wird, ist das privat finanzierte "Cosmos 1" der Planetary Society.
Vorgesehen war, es im Spätjahr des Jahres 2002 aus Kostengründen mit einer preisgünstigen russischen Volna-Rakete in eine suborbitale Laufbahn zu launchen, wo es sich entfalten und wenn alles gutgeht mit Hilfe der Photonen-Strahlung in einen Orbit bewegen soll. Zum jetzigen Zeitpunkt 04.12.2004) hat sich das Launchen auf ein Launchfenster ab dem 01.03.2005 verzögert.
Das Segel besitzt eine verstellbare Mittelstruktur, an die 8 dreieckige in der Neigung einstellbare Solarsegelsegmente befestigt sind. Durch Verstellung der Neigungswinkel soll eine Steuerung des Solarsegels erfolgen. Weitere Informationen über dieses Projekt sind über die Internetseiten der Planetary Society abrufbar.
Ein weiteres Projekt, das Chancen auf die Realisierung hat, ist das Odissee Projekt, bei dem ein quadratisches, 40 x 40 m Solarsegel im Piggy-Back-Verfahren mit einer Ariane V Rakete gelauncht und innerhalb von 1,5 Jahren den Mond passieren, sowie innerhalb von 1,7 Jahren den Erd-Orbit verlassen soll.
Ein 20 x 20 m großes Versuchssegel, bei dem unterschiedliche ultradünne Segel-Segmente aus Kapton, Mylar und Polyethylen-Naphtalat und ultraleichte ausfahrbare Kohlefasermasten getestet wurden, wurde am 17.12.1999 erfolgreich als erstes Solarsegel im Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Köln-Porz entfaltet. Nähere Informationen hierzu s. DLR Website.
Die Leichtbauweise dieser Segel und Masten wurden vom DLR gemeinsam mit ESA und engem Kontakt mit NASA/JPL entwickelt. Das geplante Segel soll bei 40 x 40 m Größe nur 35 kg wiegen, das gesamte Projekt einschließlich Nutzlast 77 kg.
Die beiden vorgenannten, kurz vor der bzw. in der Verwirklichungsphase befindlichen Projekte dürften damit dem heutigen Stand der Technik entsprechen.
Die DLR gab auf Ihrer Web-Site zu dem entwickelten Segel folgendes bekannt:
"Das vorliegende Design ermöglicht die Entwicklung eines navigierbaren Sonnensegel-Raumfahrzeugs, wobei der Lichtdruck auch für die Lageregelung genutzt wird."
Die hiermit vorgestellte Erfindung des Solar-Thruster-Seglers stellt nach Überzeugung des Erfinders bereits jetzt eine derartige Entwicklung eines hochgradig navigierbaren Sonnenseglers dar.
Einsatz des STS als Mutter- bzw. Trägerschiff
Fig. 5 zeigt die Unterseite eines Mutterschiffes auf der Basis von Fig. 1 mit 2 größeren und 4 kleineren Tochterschiffen (z. B. Mini- und Micro-STS). Diese sind mittels Halterungen, die von den Haltegurten des Mutterschiffes ausgehend in die Ringsegmente der geladenen Raumschiffe eingreifen, befestigt.
Auch andere Objekte, wie z. B. Raumstationen, Weltraum-Hotels, Material-Depots, etc. können auf der Unterseite für kurzfristigen Transport oder auf Dauer befestigt sein.
In der Beispielzeichnung könnte es sich um Satelliten handeln, die ohne eigenen Treibstoff-Verbrauch durch das Mutterschiff an den Einsatzort transportiert werden oder deren Segelfläche so klein ist, das ein Erreichen des Einsatzortes zu lange dauern würde. So wäre es dann auch möglich, Kleinsatelliten derart auszurüsten, das das Segel nur für das Stationhalten und Manövrieren in Sonnennähe ausreicht.
Das Absetzen derartiger Objekte im Sonneneinflußbereich erfolgt durch Drehen der Unterseite zur Sonne.
Da das Mutterschiff durch sein niedrigeres spezifisches Gewicht im Verhältnis zur Segelfläche stärker als das Tochterschiff von der Sonne weggedrückt wird und dadurch schneller als dieses beschleunigt, kann die Trennung erfolgen, ohne das die Gefahr durch Beschädigungen aufgrund von Thruster-Einsatz besteht.
Das Lösen der Gurthalterungen ist z. B. durch Abschmelzen mittels elektrischer Heizdrähte möglich, die bereits an den zu trennenden Stellen befestigt sind und durch Solarzellen-Strom betrieben werden.
Der Innenring als Raumfahrzeug- Docking- und Ladestation - N E U
Die derzeit in Planung befindlichen Solarsegler, haben m. E. ein großes Manko, sie können nur sehr eingeschränkt Nutzlast aufnehmen, die zudem am Ende eines Mastes, an dem sich auch die zur Steuerung des Seglers erforderlichen Thruster befinden, befestigt ist. Dies erscheint mir neben der beschränkten Aufnahmekapazität als eine recht wacklige, bruchanfällige Angelegenheit, die sicherlich auch das Manövrieren durch den außerhalb des Seglerzentrums liegenden Masseschwerpunkt noch erschwert.
Wenn erst einmal Cosmos I, der Solarsegler der Planetary Society voraussichtlich ab dem 01.März 2005 seine Mission hoffentlich erfolgreich begonnen hat, wird man, so hoffe ich, sehr schnell nach Möglichkeiten suchen, eine Bauart zu finden, die Nutzlasttransport in größerem Umfang ermöglicht. Genau das bietet das von mir hier vorgestellte Solarsegler-Design, bestehend aus dem STS-Thrusterring-Raumfahrzeug nach Fig. 1 ergänzt um eine der Innenring-Konstruktionen nach Fig.´s 8, 8a oder 8b. Sie ermöglichen neben der Aufnahme von Ladung auch das Andocken bzw. Ablegen von Tochter-Raumfahrzeugen und die Manipulation von Ladung mittels der am Ring hierzu angebrachten Vorrichtungen.
Im Grunde genommen handelt es sich hierbei um eine (kreisförmige) Aussparung im Zentrum des Seglers, die von einem Ring (z. B. als Rohrgerüst oder als ferromagnetischer Metallscheibe ausgeführt) umgeben ist, der in das Zentrum des scheibenförmigen Raumfahrzeuges gespannt und ggf. mit entsprechenden Vorrichtungen zum Docken oder zur Ladungsmanipulation versehen wird. In diese Aussparung, bzw. das Loch in der Mitte hinein begibt sich z. B. ein Thrusterring-Tochterschiff und kann dort sicher gedockt und weitertransportiert werden.
Es kann sich hierbei um sehr unterschiedliche Funktionseinheiten handeln; als wichtiges Beispiel sei hier eine flugfähiger Container genannt, durch den die Automatisierung des Be- und Entladens des Trägerschiffes möglich wird. Bei der Verwendung mehrerer Containereinheiten wird der Träger somit zum Container-Frachtschiff.
Zum Transport mehrerer Tochter-Einheiten kann der Innenring noch um zusätzliche Vorrichtungen zur Erhöhung der Aufnahmekapazität oberhalb und unterhalb des Ringes erweitert werden. Beispiele hierzu sind unter Fig. 8a und Fig. 8b aufgeführt.
Fig 8 stellt eine Kopplungseinheit dar, die sowohl zum Andocken kleinerer Raumfahrzeuge/Funktionseinheiten in Mutterstrukturen dient, als auch verschiedene Vorrichtungen zum Umgehen mit bzw./ zum Einspannen von Objekten besitzt. Bei den Vorrichtungen handelt es sich um Seilwinden, die mit unterschiedlichen Halte- bzw. Greifmöglichkeiten versehen sind, sowie um die Docking-Halterungen, die in den Innenring hineingreifen und dort beispielsweise Tochtereinheiten an deren Außenring festhalten.
In der Zeichnung ist ein Thrusterring-Tochterschiff in dem Innenring 5 des Mutterschiffes eingedockt und wird mit den Docking-Halterungen 5.1, die in den Außenring 6 der Tochter hineingreifen, sicher von in diesem Fall vier Seiten gehalten.
Bei den Vorrichtungen 5.2xx handelt es sich um Elektrowinden, an deren Seil- bzw. Fadenenden Halte- Manipulationsvorrichtungen befestigt werden können. Dargestellt sind hier beispielhaft 4 verschiedene Vorrichtungen, nämlich ein einfaches Seil in 5.2.1, ein Seil mit Haltering 5.2.2, ein Seil mit Karabinerhaken 5.2.3 und zum Schluß ein Seil mit wiederum flugfähigem Flugring 5.2.4, der selbst Haltevorrichtungen verschiedene Halte- Manipulationsvorrichtungen tragen kann.
Selbstverständlich sollten in einer realen Anwendung mehr als eine Vorrichtung derselben Art vorhanden sein, damit die Objekte im inneren des Ringes von mehreren Seiten manipuliert bzw. gespannt gehalten werden können.
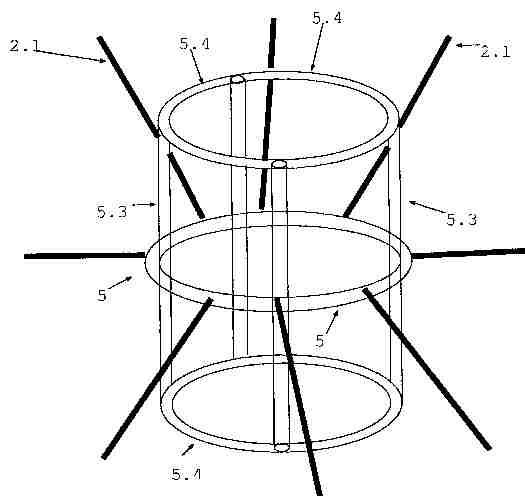
Fig. 8 a zeigt eine doppelte Dockingstation, die es erlaubt oberhalb und von unterhalb der Scheibenebene eines Thrusterring-Raumfahrzeuges oder einer entsprechenden Raumfahrt-Struktur anzudocken. Das heißt, zwei Tochter-Einheiten könnten gleichzeitig an- oder ablegen.
Die Doppel-Dockingstation wird genau wie der Docking Innenring nach Fig. 8 in das Zentrum des Außenringes mit Hilfe von Gurten, aber ggf. auch mit Hilfe von Seilen oder hochbelastbaren CNT-Fäden o. ä. eingespannt.
Zur zusätzlichen Sicherung gegen Schwingungen/Vibrationen ist auch eine Befestigung der beiden Abschlussringe 5.4 mittels Seilen oder CNT-Fäden 5.3.1, möglich, die ähnlich wie bei Zeltstangen von oben nach unten führend zum Außenring gespannt und dort befestigt werden (s. hierzu auch Fig. 8.b).
Es handelt sich hierbei um ein leichtes Gerüst bestehend aus 3 Rohr-Ringen oder auch aus Ring-Scheiben, die durch vertikal stehende Rohre 5.3 auf Abstand gehalten und stabilisiert werden.
Grundsätzlich kann hier das gleiche Zubehör (Winden, Docking-Halterungen, etc.) zur Verwendung kommen, wie bereits in den Erläuterungen zur Einzeldockingstation ausführlich erörtert.
Fig. 8. b zeigt eine Magazin-Dockingstation, die es erlaubt, Raumfahrzeuge und flugfähige Funktionseinheiten in größerer Zahl mit einem Mutterschiff im hierfür besonders günstigen Zentrum der Scheibe zu transportieren, sowie automatisch andocken und ablegen zu lassen. In der Zeichnung ist ein Tochterschiff direkt über dem Mittelring eingedockt. An diesem Ring sind in der Zeichnung nach oben und unten abgehende Rohre befestigt, die hierdurch einen säulenförmigen, nach oben und unten offenen und in der Mitte leeren Laderaum bilden. In diesen Raum hinein greifen elektromechanische Halterungen, die die Tochter-Einheiten je nach Bedarf durch hinein- oder herausfahren halten, bzw. freigeben können.
Bevorzugte Anwendungen wäre der Transport ganzer Schwärme von Nachrichten- und Beobachtungsatelliten zu ihrem Einsatzort und die Verwendung in einem Container-Transport-Raumschiff.
In der vorliegenden Zeichnung ist zwar nur ein Dock mit 6 Anlegestellen eingezeichnet, grundsätzlich können jedoch auch inbesondere wegen der flachen Bauweise der Thrusterring-Raumfahrzeuge noch erheblich mehr Einheiten durch eine Verlängerung der Vertikalrohre 5.3 und zusätzliche Docking-Halterungen eingedockt werden.
Starts und Landungen von/auf z. B. Asteroiden werden nicht durch die hohe Schwerkraft benachteiligt, die z. B. auf einem Planeten wie der Erde herrscht. Dadurch ist die erforderliche Schubkraft und der Treibstoffverbrauch gegenüber Erdberührungen so stark verringert, daß auch schwächere Antriebe wie z. B. der Ionen-Antrieb diese Aufgaben verrichten können.
Der Mini-STS eignet sich insbesondere zur Erkundung und Entnahme von Gesteinsproben von Asteroiden in Sonnennähe. Er könnte z. B. durch ein größeres Mutterschiff an seinem sonnennahen Einsatzort abgesetzt werden, den ausgewählten Asteroiden erkunden und dort einen oder mehrere vielversprechende Landepunkte gezielt ansteuern.
Nach den erfolgten Proben-Entnahmen wäre er wegen des in Sonnennähe stark erhöhten Strahlungsdruckes trotz seiner geringfügigen Segelfläche, in der Lage aus eigener Kraft mit Hilfe des Solar-Segels wieder zur Erde zurückzukehren. Das Mutterschiff wäre somit frei für eigene Aufgaben oder das Absetzen weiterer Mini-STS an anderen Einsatzorten. So könnten gleichzeitig multiple Missionen durch ein einziges Mutterschiff initiert werden.
Wie kann ein Solarsegler mit geringer Segelfläche noch das zusätzliche Gewicht für Ionen-Thruster, Treibstoff und die zurückzuführenden Bodenproben überhaupt aufnehmen?
Die Stärke der Sonnenstrahlung (solar flux) verändert sich nach dem Verhältnis 1/r^2, wobei r die Entfernung des Objektes zur Sonne ist. Bei einer Halbierung der Entfernung zur Sonne vervierfacht sich die Sonnen-Strahlung bereits. Bei einer weiteren Halbierung erreicht sie schon den 16-fachen Wert.
Anders herum ausgedrückt kann man sagen, daß z. B. in einem Abstand von einem Viertel der mittleren Erd- Sonne- Entfernung ( 0,25 AU) ein Minisegler mit nur einem Sechzehntel der Fläche eines sechzehn mal größeren Seglers auf Erdhöhe die gleiche Antriebskraft wie dieser aus dem Druck der Sonnenstrahlung gewinnt. Da er jedoch sechzehn mal kleiner und dadurch auch erheblich leichter als sein größerer Bruder ist, kann für die hiermit ersparte Masse der Konstruktion zusätzliche Nutzlast transportiert werden.
Unser Mini-Solar-Segler mit einem Durchmesser von 10 m (ca. 78,5 qm Fläche) würde also die Schubkraft eines 1256 qm Segels auf Erdhöhe entwickeln. Dies wäre immerhin mehr, als das 30 m Durchmesser umfassende Solarsegel der Planetary Society, Cosmos 1 , daß hoffentlich ab dem 01. März des Jahres 2004 in eine Erdumlaufbahn gestartet wird.
Der Bau und das Launchen solcher Leichtgewichts- Solarsegel wären Sonderangebote im Vergleich mit den Kosten für sonnennahe Missionen, die auf anderen Antriebsarten beruhen (falls überhaupt möglich), weil für die aus der Sonnenenergie gewonnene Antriebskraft kein Treibstoff mitgeführt werden muß.
Bedenkt man, daß für die dann möglichen mehrfach- und aufeinanderfolgenden Missionen die gleichen Raumfahrzeuge immer wieder verwendet werden könnten, liegt ein weiterer großer Vorteil einer derartigen Entwicklung auf der Hand. Es handelt sich nicht um verlorene Investitionen, die nach Beendigung einer Mission "nur" das gewonnene Wissen hinterlassen, sondern um Langzeit-Investitionen, die neben der gewonnen Erfahrung installierte Raumfahrt-Substanz in Form der weiterhin einsatzfähigen Solarsegler hinterlassen.
Durch das niedrigere Gewicht der Digital-Thruster können noch kleinere Satelliten, die dann auch im Cluster-Verbänden operieren können, eingesetzt werden.
Der Micro-STS ist gedacht als im sonnennahen Raum eingesetzter Satellit, z. B. zur Beobachtung der Sonnen-Magnetosphäre und zur Erforschung des sonnennahen Raumes enschließlich der Planeten Merkur und Venus.
Fig. 8
Zu Fig. 8 - Innenring als Docking und Ladestation
Fig. 8. a
Zu Fig.8 a - Doppelter Innenring als Zweifach- Docking- und Ladestation
Fig. 8. b
Zu Fig.8 b - Magazin-Docking-Station
Mini STS
Micro STS
Fig.1 -
Fig.2a-2b -
Fig.2c -
Fig.2d -
Fig.3a-3b -
Fig.4.a - 4.b -
Fig.4.c -
Fig.8 -
Fig.8a -
Fig.8b -
| POST & AUTOR & Vision | STS - Solar Thruster Segler | RSS - Ring Segment System | LTH - Launcher Transport Kopf | EFO - Experimentelles Flug Object | RSC - Rotations Schleuder |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}